
DR. MARIO CASTELÁN
Profesor/Investigador Cinvestav 3C
- DPhil in Computer Science (2006). The University of York, York, UK.
- MSc in Artificial Intelligence (2002). Faculty of Physics and Artificial Intelligence, University of Veracruz.
- BSc in Computer Science (1999). Faculty of Statistics and Informatics, University of Veracruz.
Research lines: Reconstruction of surfaces from 2D projections, statistical methods for recovery and shape recognition, facial analysis, shape-from-X techniques, integration methods from gradient fields, lighting models, active models of appearance , coupled statistical models, photometric stereo techniques.
Categoría SNI: Nivel I Email: mario.castelan@cinvestav.edu.mx Tel: (844)438-96-00 Ext. 8501
RESEARCH
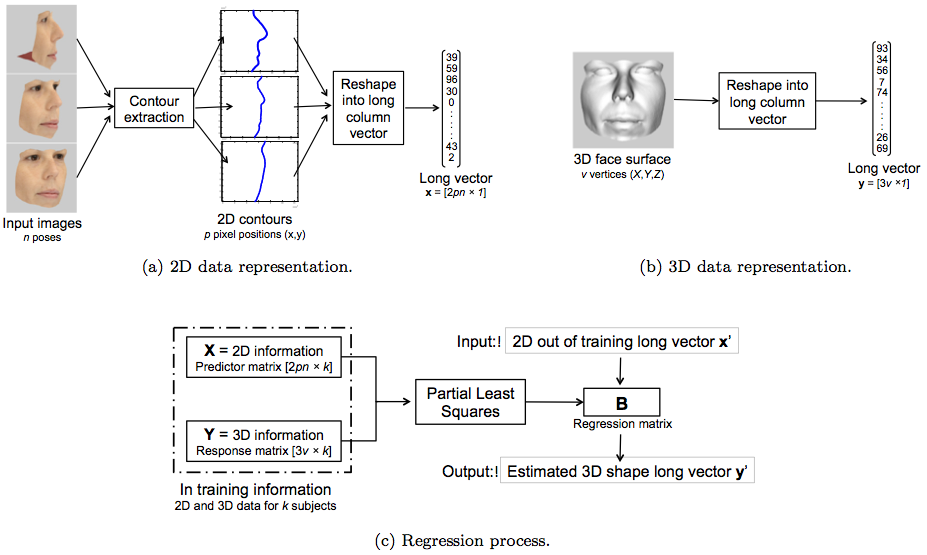
3D face shape recovery from occluding contours
For many shape analysis problems, I believe that coupled variations provide a more suitable way for understanding the nature of data and the hidden language of the variables involved in the studied phenomena, as in this statistical model of shape and texture for 3D face shape recovery from 2D contours.
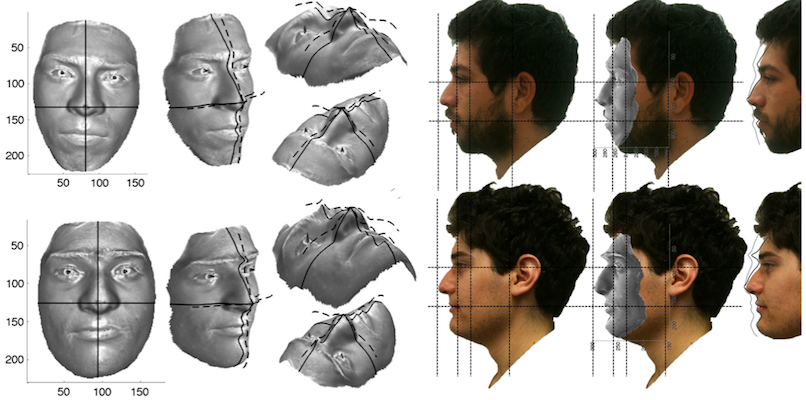
Extended photometric analysis
This research has been focused on a photometric stereo approach that is exclusive for face shape recovery, seeking for a coherent way to keeping facial proportions when estimating shape from several 2D images.
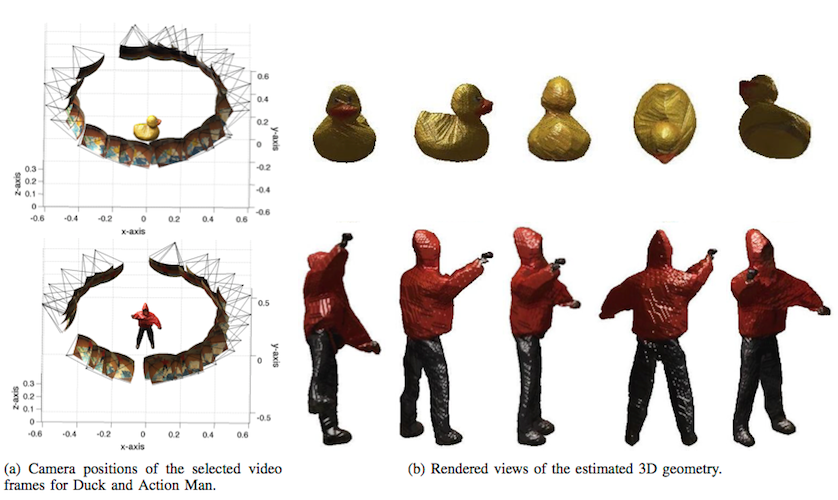
3D object reconstruction from a humanoid generated video sequence
I have worked on the development of geometric approaches for the monocular-based localization of humanoid robots, finding applications in both navigation and object reconstruction tasks.
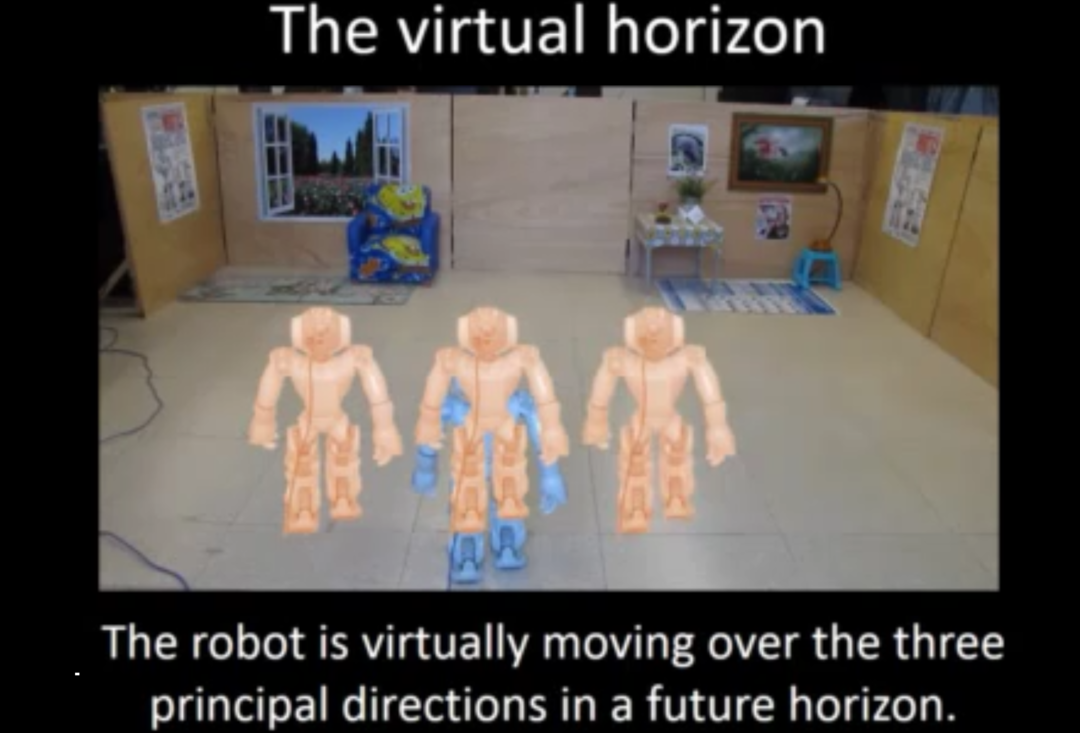
Persisten localization of a humanoid robot
Robot localization is an important skill in the quest for autonomy. I have explored using Principal Component Analysis to lead the robot to safer directions for keeping a healthy localization.

Av. Industrial Metalurgia #1062, Parque Ind. Ramos Arizpe, Ramos Arizpe, Coah. C.P. 25900, México. Tel. +52 (844) 438-9600