
by admin | Dec 8, 2017
Underwater environments present complex technical challenges in various aspects. On one hand, we need to account for the right sensing and actuation systems, which when integrated into a robotic system with appropriate technology, they can greatly facilitate the...
by admin | Dec 8, 2017
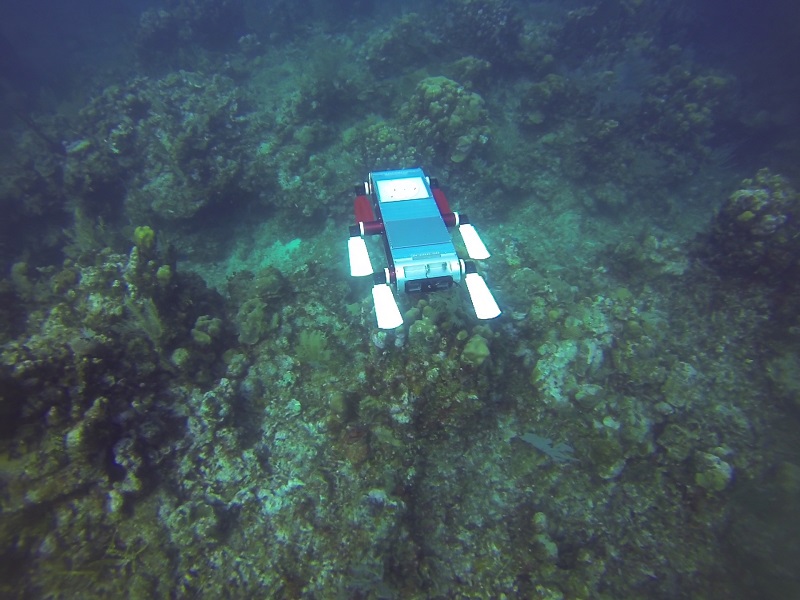
We have developed a behavioral approach for autonomous robotic exploration of marine habitat with collision avoidance. In particular, we are interested in exploration and continuous monitoring of coral reefs in order to diagnose disease or physical damage, while...
Recent Comments