by atorres | Nov 12, 2017
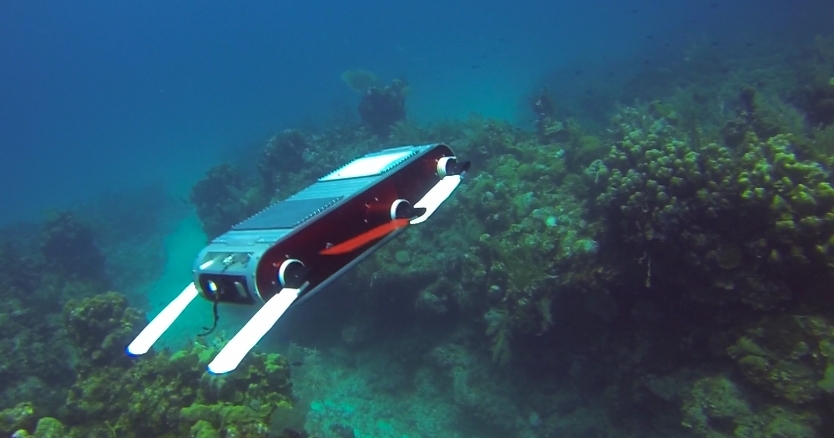
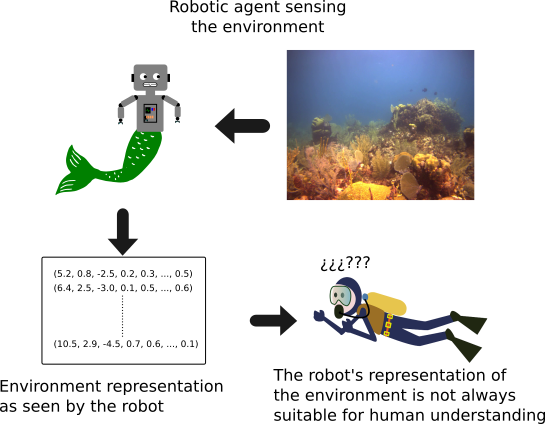
In this project we have developed a method for vision-based place recognition in environments with a high content of similar features and that are prone to variations in illumination[1]. Particularly, we have focused on underwater environments[2]. The high similarity...
Recent Comments