This research project focus on the development of computer vision methods for creating a topological map of an underwater environment based on visual information that can be used for robots and humans to navigate.
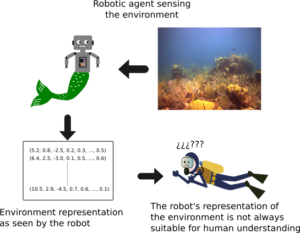
There exist several methods that can create metric maps of an environment [1,2]. A metric map is representation of the environment where the spatial relationships between features is preserved. Although, these kind of maps are very desirable for different robotic tasks, they are not always the best option, for examples when we have a dinamic environment. Also, these maps are not always easily understandable for other humans.
An alternative approach for representing an environment is by topological maps, which represent the environment as a graph. In this kind of maps, the places are Nodes and the relations between them are captured by the Edges. The information of the edges not necessarily has to be metric information,it can any kind of information that establishes a relation between nodes.
The main objective of this project is to create a topological map of an underwater environment using relevant visual information. The resulting topological map should be understandable by humans and robots for navigation purposes.
References
[1] Eustice, Ryan M., Oscar Pizarro, and Hanumant Singh. “Visually augmented navigation for autonomous underwater vehicles.” IEEE Journal of Oceanic Engineering 33.2 (2008): 103-122.
[2] Mur-Artal, Raul, J. M. M. Montiel, and Juan D. Tardós. “Orb-slam: a versatile and accurate monocular slam system.” IEEE Transactions on Robotics 31.5 (2015): 1147-1163.
Recent Comments