by garechav | Dec 8, 2017
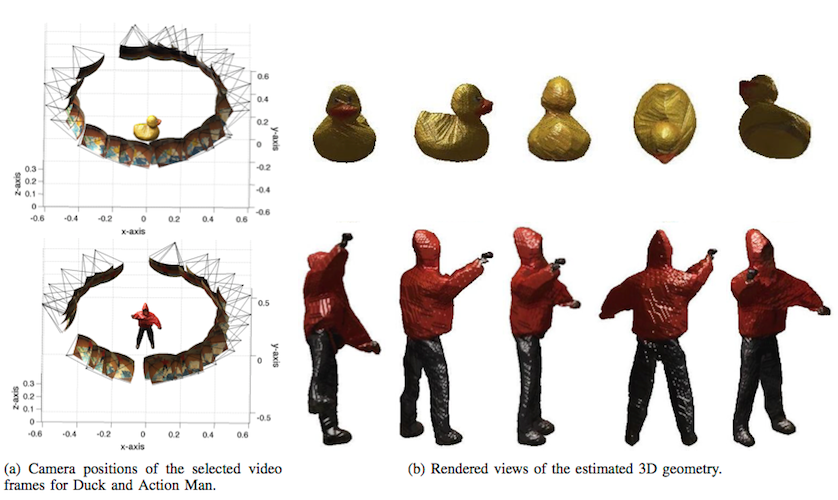
Typical monocular localization schemes involve solving for matches between reprojected 3D world points and 2D image features in order to estimate the absolute scale transformation between the camera and the world. Successfully calculating such transformation implies...

by garechav | Dec 8, 2017
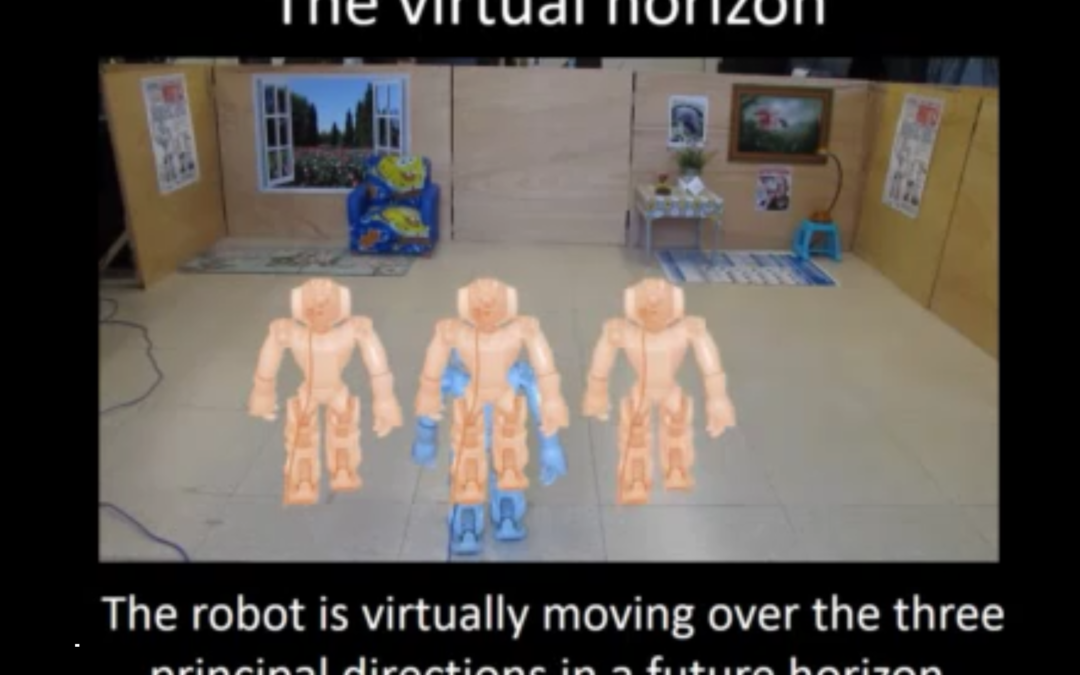
Authors: Josafat Delfín, Héctor Becerra and Gustavo Arechavaleta Abstract: In this paper, we address the problem of humanoid locomotion guided from information of a monocular camera. The goal of the robot is to reach a desired location defined in terms of a target...
by garechav | Dec 8, 2017
Authors: E. Olguín-Díaz, G. Arechavaleta, G. Jarquín and V. Parra-Vega Abstract: A passivity-based model-free control scheme for underwater fully actuated vehicle-manipulator system (UVMS) in contact tasks is proposed. An orthogonalized motion and force second order...

Recent Comments